|
46| 5
|
[项目] 【Arduino 动手做】Dtto 自我重新配置的组合式机器人 |
|
问题 在大多数自然灾害中,例如飓风、地震、火灾,都会有人被困,无法自行逃生。这时,搜救队就派上用场了。如今,大多数搜救行动都由人工进行,需要大量专业人员和大量时间来寻找可能的幸存者。 在世贸中心遗址工作后,南佛罗里达大学计算机科学教授、从事搜救机器人研究的罗宾·墨菲博士说: “机器人被证明是有帮助的”;“使用机器人可以最大限度地减少现场人员数量,并减少疲劳和错误”;她将移动机器人视为能够导航、适应和感知的侦察兵。;“机器人将是便携式的”;“非常小,它们可以适应人类无法企及的狭小空间,能够在废墟中的空地上蜿蜒前行时辨别方向”;“……去人类不应该去的地方” 来源:(http://www.aaai.org/Pressroom/Releases/release-02-0910.php) 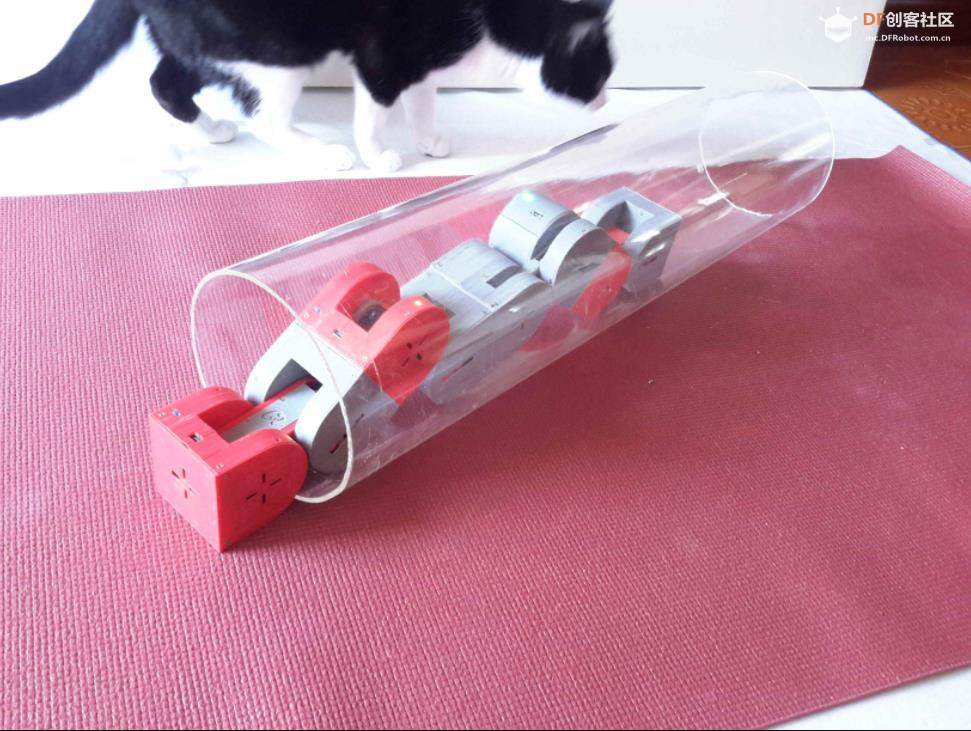   |
|
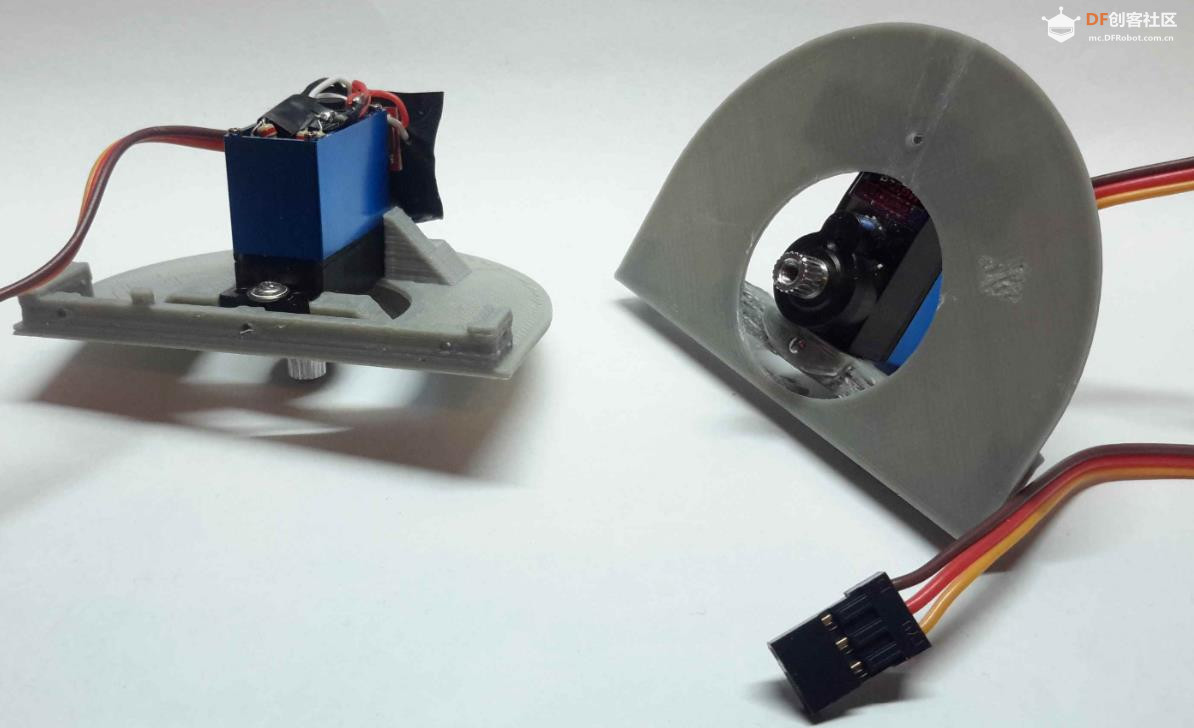
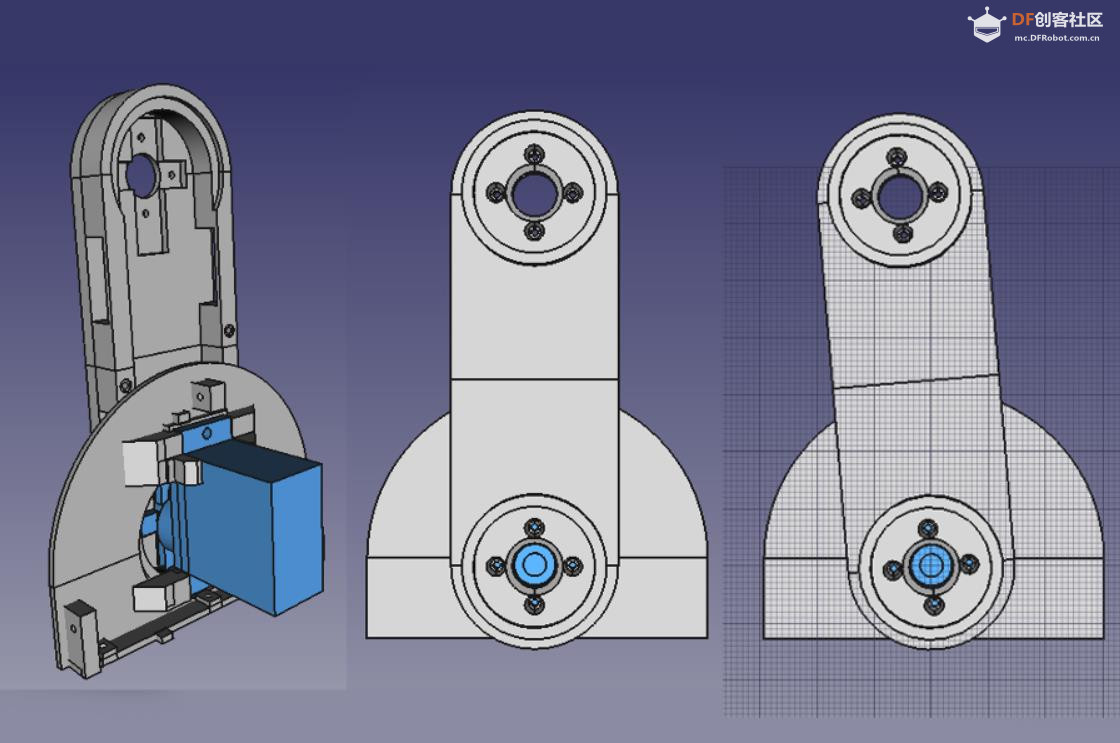
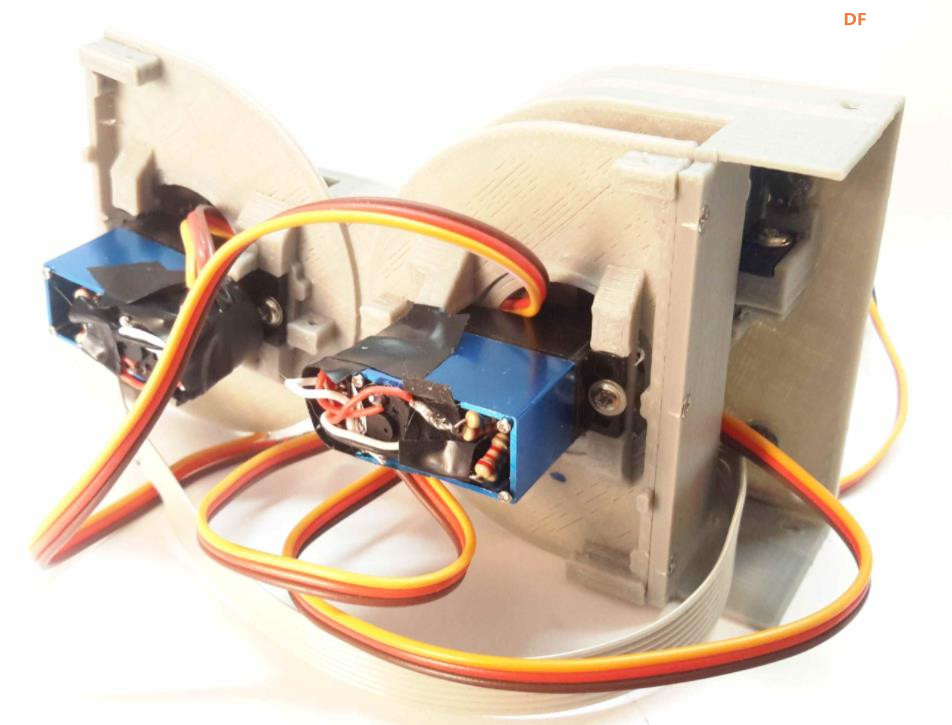
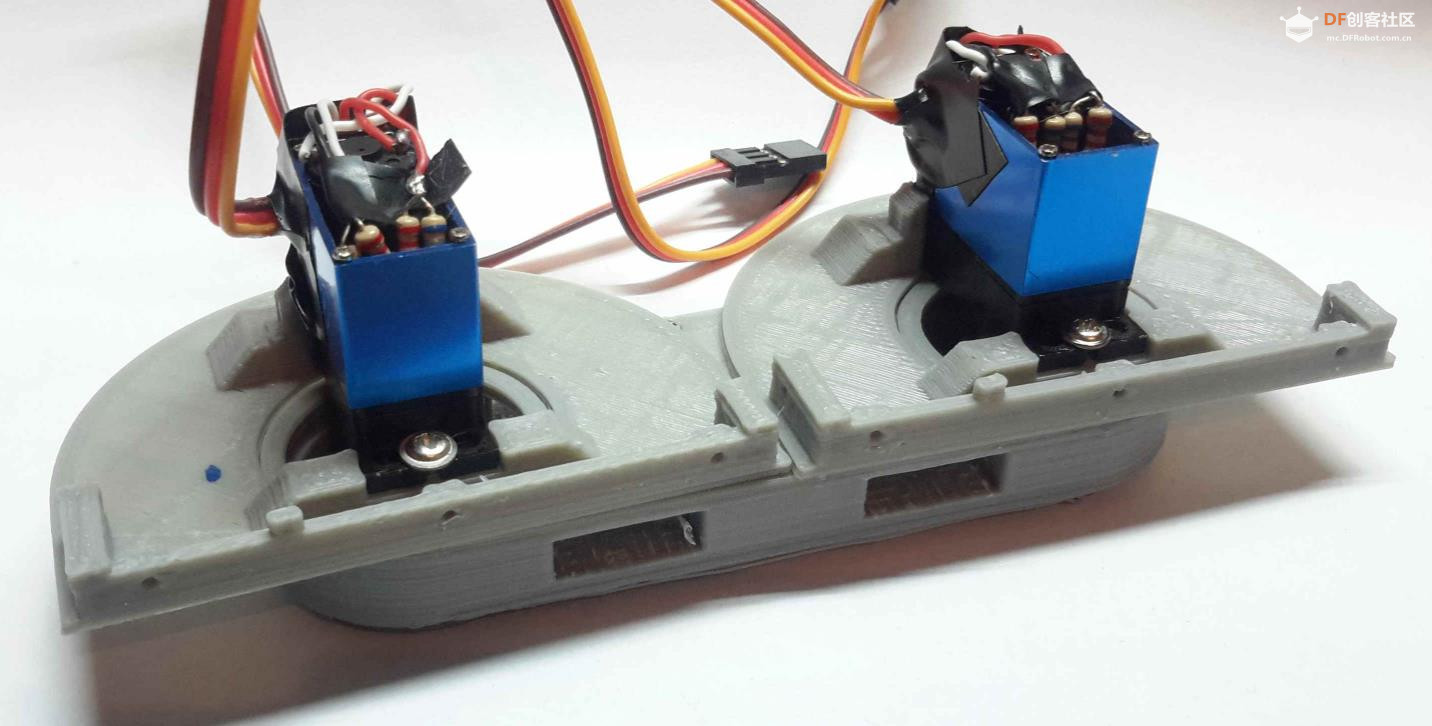
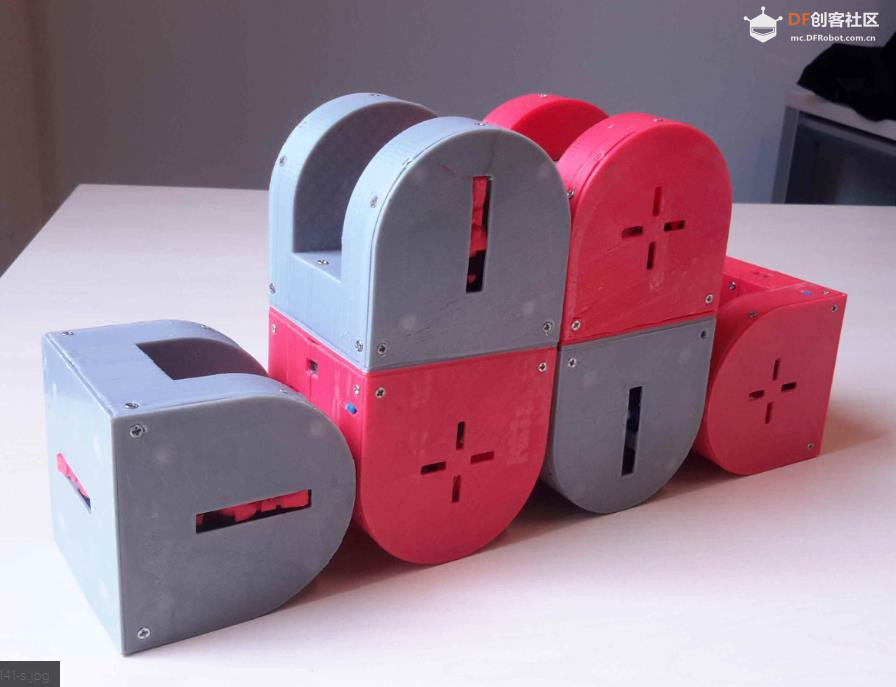
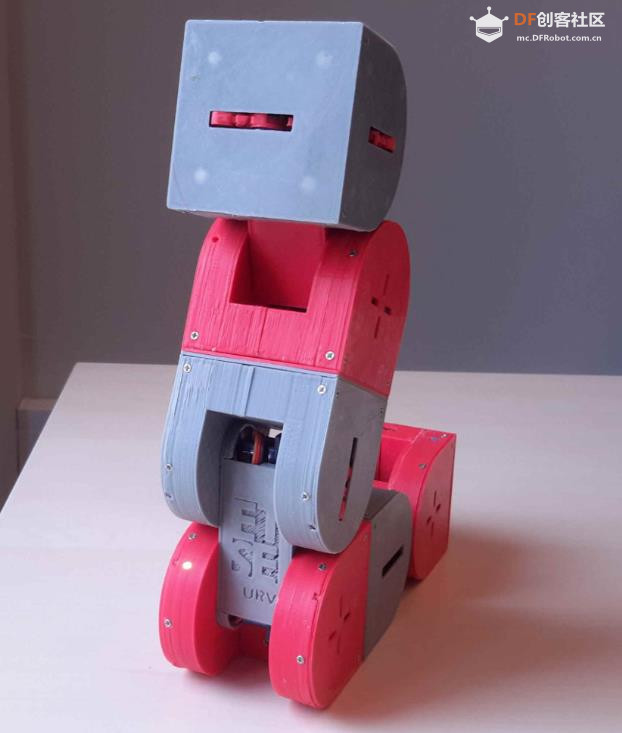
工作原理 在机器人技术中,设计探测机器人的常用方法是:首先研究地形特征,然后根据这些需求设计机器人。当机器人穿越未经探索且难以预测的地形(例如受地震影响的建筑物)时,你永远不知道会遇到什么样的障碍物。而这正是模块化机器人能够大展身手的地方。 Dtto 模块化机器人的设计充分考虑了适应性。其灵感源自火蚁群落的工作方式,多个模块(或小型机器人)相互连接,机械连接,协同工作,最终形成一个整体机器人,从而创造出一种集体智慧。它们可以连接在一起,构建无需任何中央指令的结构。所有模块都相同的优势在于,如果其中一个模块损坏,可以轻松更换,从而形成一个自修复结构。 通过改变配置,Dtto机器人可以像 蛇一样穿过一条小管道,然后变成一个轮子状的机器人以更快地移动,然后在没有垂直空间时 变成蜈蚣机器人,最后建造一座桥到达悬挂地板的另一侧。   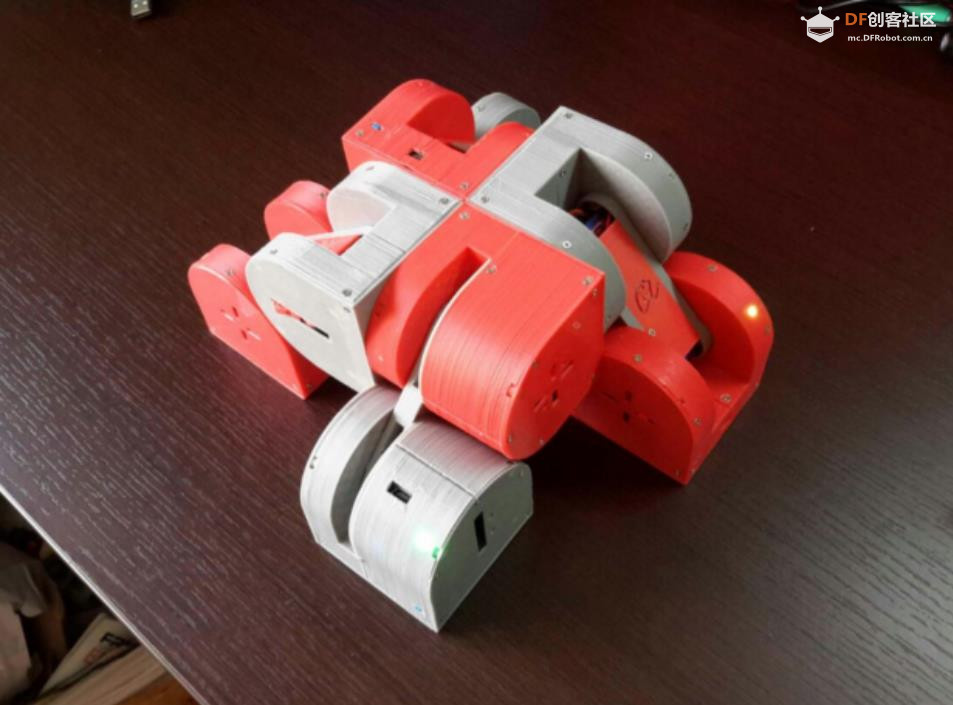 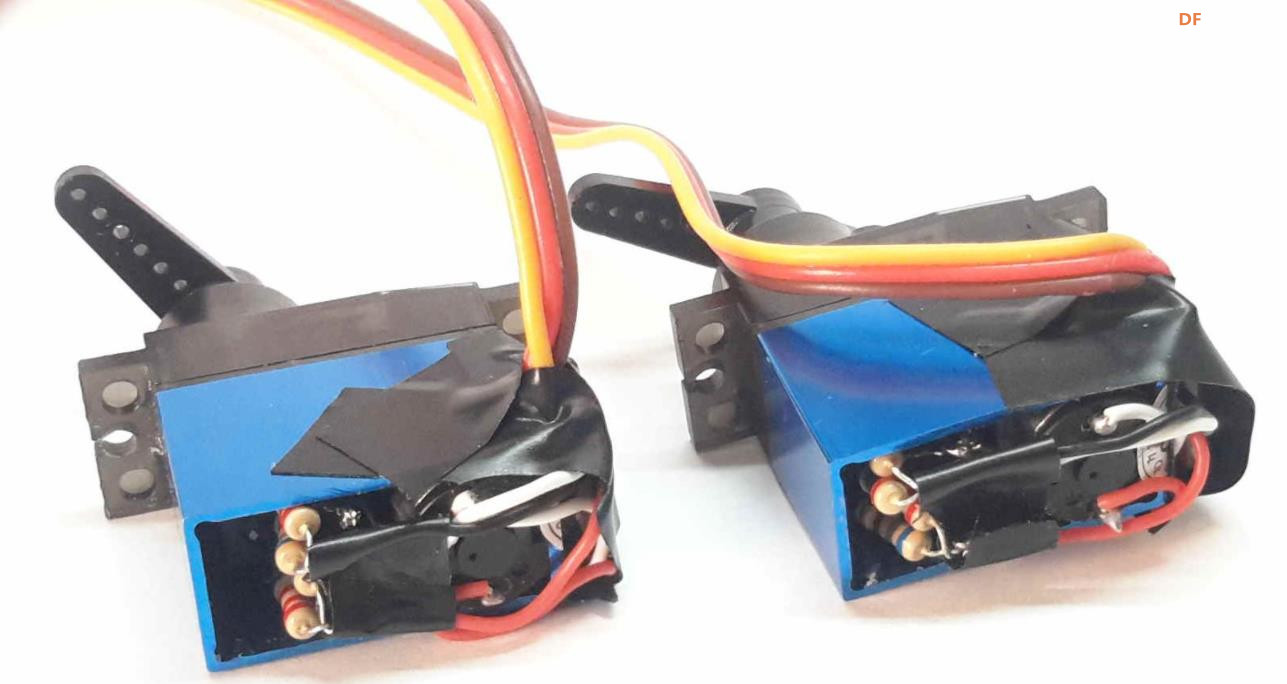 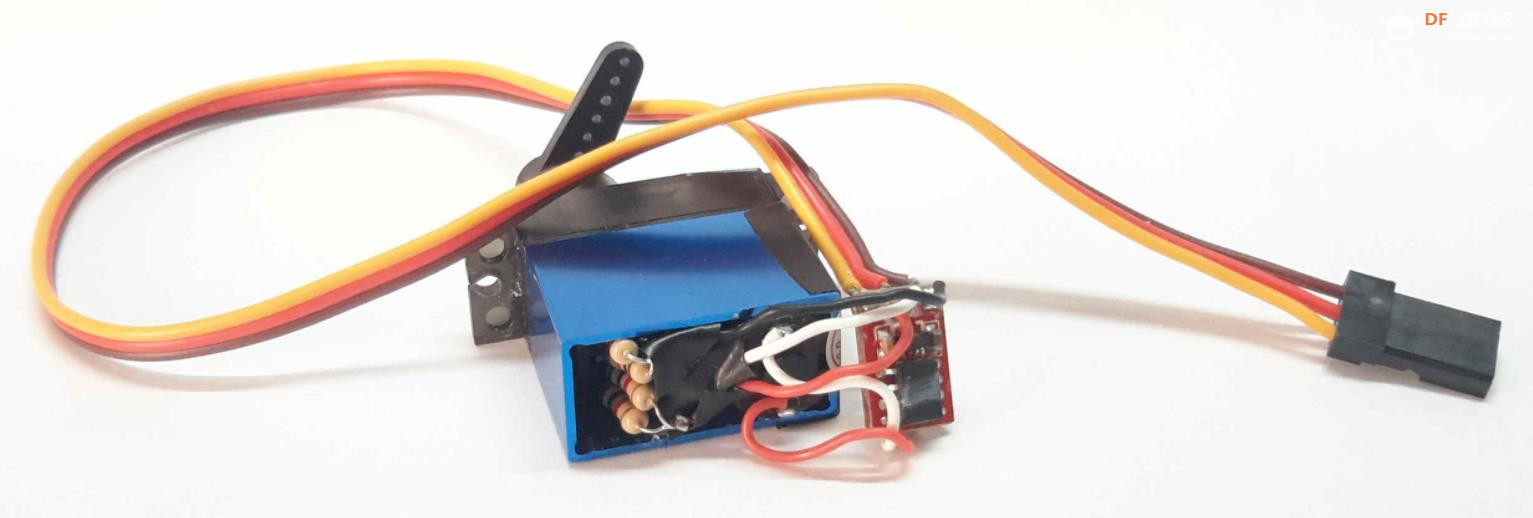 |


 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2025 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶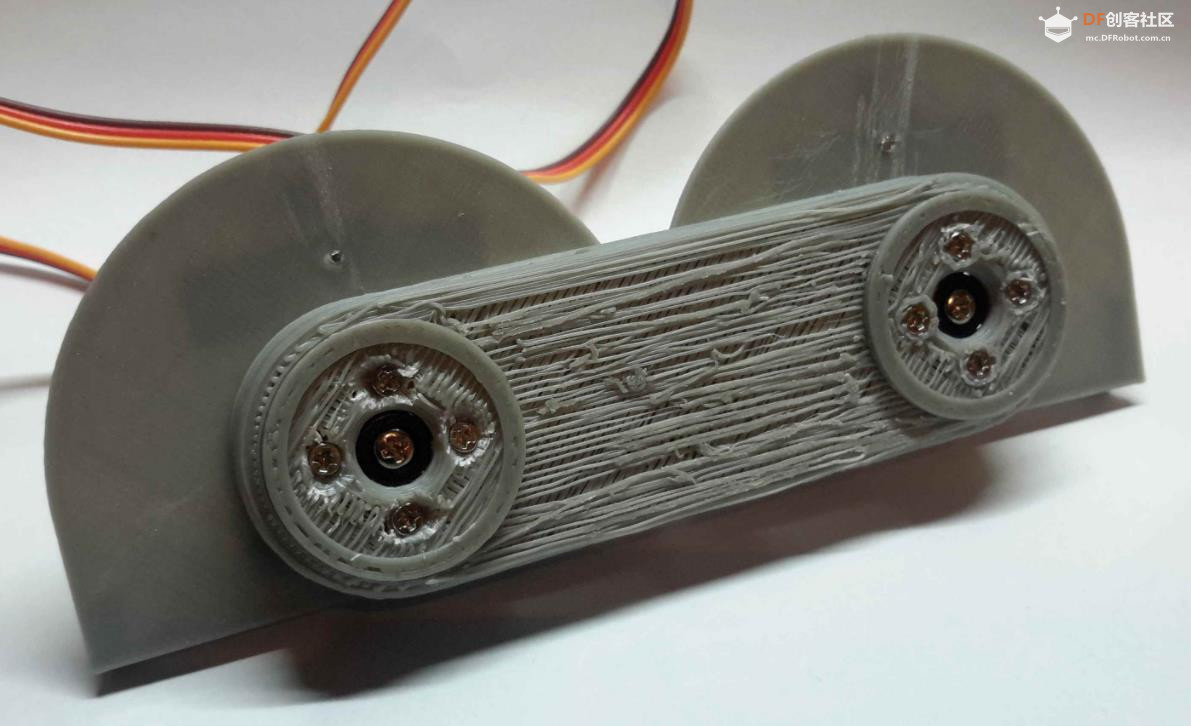




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






